Speaker: Florian Steinschorn
In this thesis, we compare different parameter-optimization algorithms on the example of Screened Poisson Surface Reconstruction. To do this, we first implemented five state-of-the-art algorithms. GEIST is a graph-based algorithm that splits the parameter space into an `optimal' and a `non-optimal' set to select new configurations. Iterated F-Race places a normal distribution of selection probabilities on the best configurations of the last iteration and uses that to choose the next configurations. ParamILS uses iterative local search to select a better neighbor and find an optimum this way. PostSelection uses a shortened version of an algorithm to find promising candidates and a second, more detailed one to evaluate these. As a simple baseline we also implemented Brute-Force.
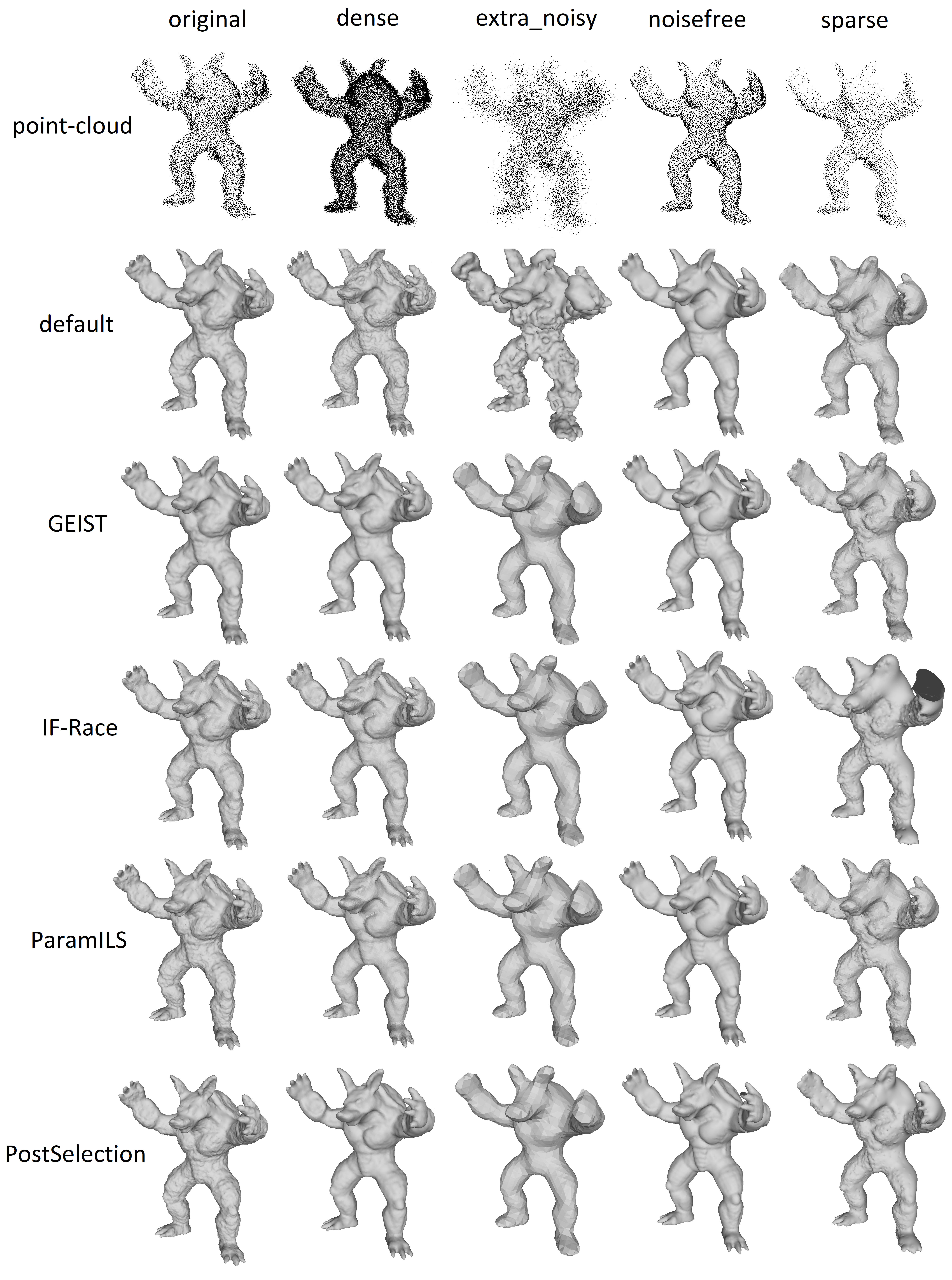
For all of these algorithms, we first conduct several tests to find a good configuration to run them with. After that, we test them on point clouds from two datasets. Each dataset contains each cloud in different qualities, so we are able to test varying input qualities as well as types. We show that each of the implemented algorithms is able to find better parameter configurations than the default Screened Poisson Surface Reconstruction configuration. In most cases, GEIST and PostSelection lead to the best results but also have the longest run times, while ParamILS and Iterated F-Race lead to good results in a far shorter time period. Brute-Force is not competitive when it comes to high-quality configurations, but still leads to an improvement over the default in most cases.
To summarize the results over different types and qualities, the default configuration yields acceptable but not ideal results for point clouds of smooth meshes with little noise and we suggest an alternative. If the surface is rougher, the importance weight of the points should ideally be set higher. If there is a lot of noise, this weight as well as the Octree depth should be reduced.
We discuss the advantages and disadvantages of each implemented algorithm and compare their results to recommend which one to use. We describe our implementations of each and quickly mention what work could be done to expand on this thesis. Finally, we give recommendations as to which configurations to use for different types of point clouds. For data with higher accuracy, $depth$ and $pointWeight$ should be higher than for data with lower accuracy. If the topology of the object is very complex, $pointWeight$ is best set very high in comparison to simpler point clouds. We find that for most cases, IF-Race is the best compromise to use between speed and resulting quality of reconstruction. If time is of no concern, GEIST is an alternative that yields high-quality results.