

Andre Neubauer
Virtual Endoscopy for Preoperative Planning and Training of Endonasal Transsphenoidal Pituitary Surgery
Supervisor: Eduard Gröller , Katja Bühler
, Katja Bühler
Duration: April 2003 — June 2005
[ pdf]
pdf]
Information
- Publication Type: PhD-Thesis
- Workgroup(s)/Project(s): not specified
- Date: June 2005
- Date (Start): April 2003
- Date (End): June 2005
- TU Wien Library:
- First Supervisor:
Abstract
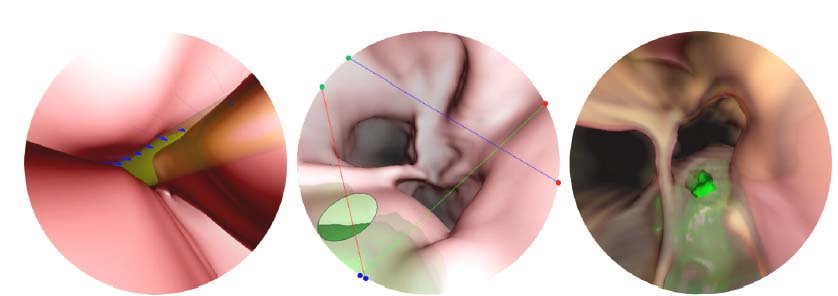
Virtual endoscopy is the navigation of a virtual camera through anatomy, computationally reconstructed from radiological data. Virtual endoscopy mimics physical minimally invasive surgical activity and is used for diagnosis (e.g., the detection of colon polyps), planning of endoscopic interventions, postoperative assessment of surgical success and training for inexperienced endoscopists. This thesis introduces STEPS, a virtual endoscopy system designed as a planning and training tool for endonasal transsphenoidal pituitary surgery, a method used to minimally invasively remove tumors of the pituitary gland. A rigid endoscope is inserted into the nose and advanced through intracranial cavities towards the bony wall covering the pituitary gland. This bone is then opened and the tumor is removed. STEPS reconstructs the boundaries of the investigated cavities primarily using iso-surfacing in original CT data. Presegmented objects of interest can be added to the scene and displayed behind the semi-transparent isosurface. These objects (e.g., the tumor, the pituitary gland and important blood vessels) provide an augmented picture of patient anatomy to guide the surgeon, aid in planning the endoscopic approach, and help the user find an ideal site for actual surgical activity. Visual information can be further enhanced by display of rigid structures beyond the isosurface. The user can freely decide upon colors and lighting conditions. All rendering techniques applied by STEPS are completely CPU-based, ensuring a high amount of flexibility and hardware-independence. Nevertheless, rendering is efficient resulting in smooth interaction. STEPS allows free navigation through the nasal and paranasal anatomy, but can also be used to simulate the movement parameters of the rigid endoscopes. This includes simulation of surgical instruments and haptic feedback. Furthermore, STEPS allows the simulation of angled endoscopes and the simulation of barrel distortion as exhibited by real endoscope optics. This thesis gives an overview about existing techniques and applications of virtual endoscopy, introduces the field of application, and, in detail, describes STEPS, the required preprocessing, the rendering techniques and the user interface.Additional Files and Images

Weblinks
No further information available.BibTeX
@phdthesis{neubauer-2005-vir,
title = "Virtual Endoscopy for Preoperative Planning and Training of
Endonasal Transsphenoidal Pituitary Surgery",
author = "Andre Neubauer",
year = "2005",
abstract = "Virtual endoscopy is the navigation of a virtual camera
through anatomy, computationally reconstructed from
radiological data. Virtual endoscopy mimics physical
minimally invasive surgical activity and is used for
diagnosis (e.g., the detection of colon polyps), planning of
endoscopic interventions, postoperative assessment of
surgical success and training for inexperienced
endoscopists. This thesis introduces STEPS, a virtual
endoscopy system designed as a planning and training tool
for endonasal transsphenoidal pituitary surgery, a method
used to minimally invasively remove tumors of the pituitary
gland. A rigid endoscope is inserted into the nose and
advanced through intracranial cavities towards the bony wall
covering the pituitary gland. This bone is then opened and
the tumor is removed. STEPS reconstructs the boundaries of
the investigated cavities primarily using iso-surfacing in
original CT data. Presegmented objects of interest can be
added to the scene and displayed behind the semi-transparent
isosurface. These objects (e.g., the tumor, the pituitary
gland and important blood vessels) provide an augmented
picture of patient anatomy to guide the surgeon, aid in
planning the endoscopic approach, and help the user find an
ideal site for actual surgical activity. Visual information
can be further enhanced by display of rigid structures
beyond the isosurface. The user can freely decide upon
colors and lighting conditions. All rendering techniques
applied by STEPS are completely CPU-based, ensuring a high
amount of flexibility and hardware-independence.
Nevertheless, rendering is efficient resulting in smooth
interaction. STEPS allows free navigation through the nasal
and paranasal anatomy, but can also be used to simulate the
movement parameters of the rigid endoscopes. This includes
simulation of surgical instruments and haptic feedback.
Furthermore, STEPS allows the simulation of angled
endoscopes and the simulation of barrel distortion as
exhibited by real endoscope optics. This thesis gives an
overview about existing techniques and applications of
virtual endoscopy, introduces the field of application, and,
in detail, describes STEPS, the required preprocessing, the
rendering techniques and the user interface.",
month = jun,
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Institute of Computer Graphics and Algorithms, Vienna
University of Technology ",
URL = "https://www.cg.tuwien.ac.at/research/publications/2005/neubauer-2005-vir/",
}