

Irene Reisner-Kollmann, Andreas Reichinger, Werner Purgathofer
3D Camera Pose Estimation using Line Correspondences and 1D Homographies
In Advances in Visual Computing: 6th International Symposium on Visual Computing (ISVC 2010), pages 41-52. 2010.
Information
- Publication Type: Conference Paper
- Workgroup(s)/Project(s):
- Date: 2010
- ISBN: 978-3-642-17273-1
- Series: Lecture Notes in Computer Science
- Publisher: Springer
- Location: Las Vegas, Nevada, USA
- Lecturer: Irene Reisner-Kollmann
- Editor: Bebis, G.; Boyle, R.; Parvin, B.; Koracin, D.; Chung, R.; Hammoud, R.; Hussain, M.; Tan, K.-H.; Crawfis, R.; Thalmann, D.; Kao, D.; Avila, L.
- Booktitle: Advances in Visual Computing: 6th International Symposium on Visual Computing (ISVC 2010)
- Conference date: 29. November 2010 – 1. December 2010
- Pages: 41 – 52
- Keywords: pose estimation, line matching
Abstract
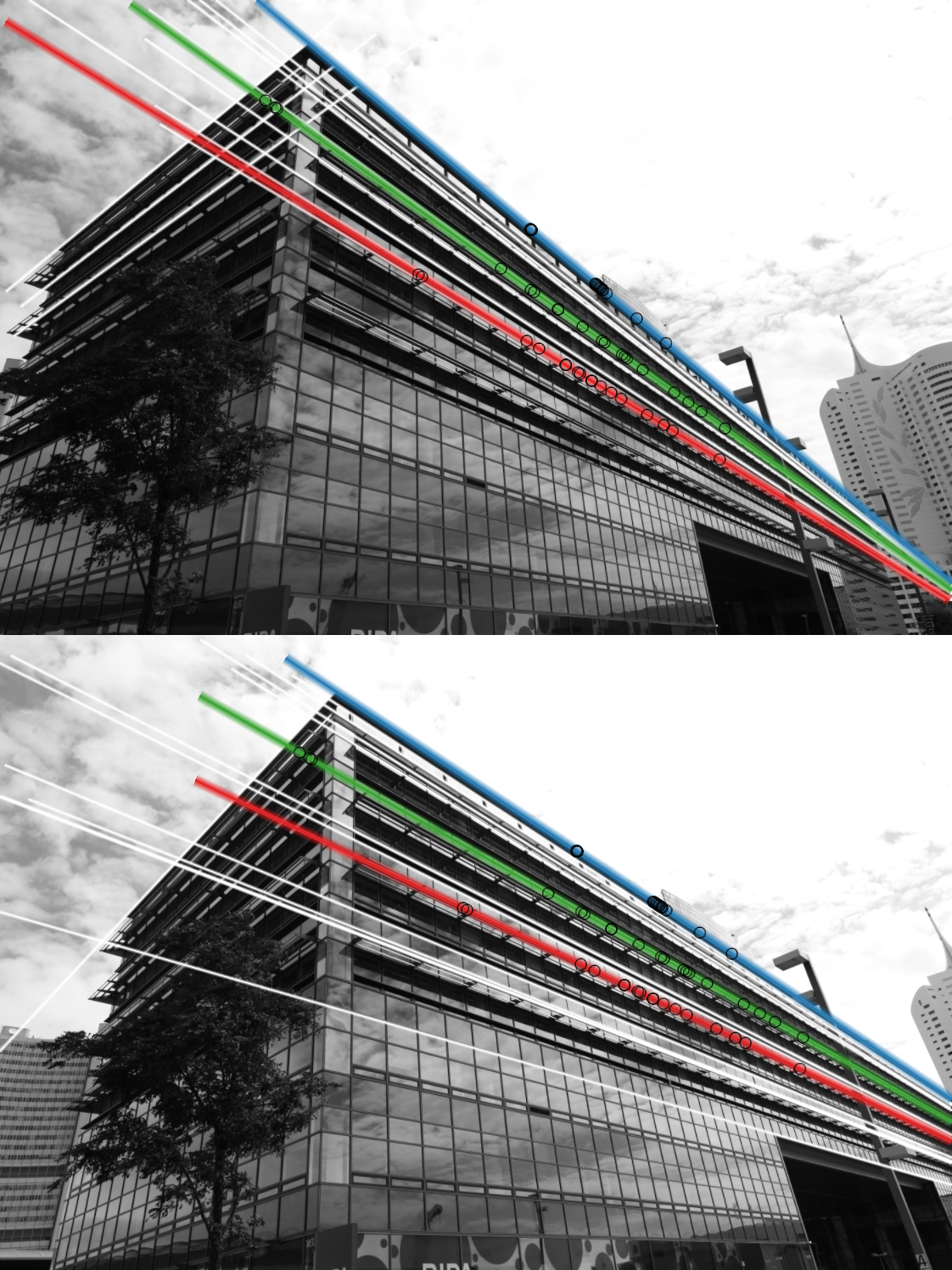
This paper describes a new method for matching line segments between two images in order to compute the relative camera pose. This approach improves the camera pose for images lacking stable point features but where straight line segments are available. The line matching algorithm is divided into two stages: At first, scale-invariant feature points along the lines are matched incorporating a one-dimensional homography. Then, corresponding line segments are selected based on the quality of the estimated homography and epipolar constraints. Based on two line segment correspondences the relative orientation between two images can be calculated.Additional Files and Images


Weblinks
No further information available.BibTeX
@inproceedings{reisner-2010-1dh,
title = "3D Camera Pose Estimation using Line Correspondences and 1D
Homographies",
author = "Irene Reisner-Kollmann and Andreas Reichinger and Werner
Purgathofer",
year = "2010",
abstract = "This paper describes a new method for matching line segments
between two images in order to compute the relative camera
pose. This approach improves the camera pose for images
lacking stable point features but where straight line
segments are available. The line matching algorithm is
divided into two stages: At first, scale-invariant feature
points along the lines are matched incorporating a
one-dimensional homography. Then, corresponding line
segments are selected based on the quality of the estimated
homography and epipolar constraints. Based on two line
segment correspondences the relative orientation between two
images can be calculated.",
isbn = "978-3-642-17273-1",
series = "Lecture Notes in Computer Science",
publisher = "Springer",
location = "Las Vegas, Nevada, USA",
editor = "Bebis, G.; Boyle, R.; Parvin, B.; Koracin, D.; Chung, R.;
Hammoud, R.; Hussain, M.; Tan, K.-H.; Crawfis, R.; Thalmann,
D.; Kao, D.; Avila, L.",
booktitle = "Advances in Visual Computing: 6th International Symposium on
Visual Computing (ISVC 2010)",
pages = "41--52",
keywords = "pose estimation, line matching",
URL = "https://www.cg.tuwien.ac.at/research/publications/2010/reisner-2010-1dh/",
}