

Irene Reisner-Kollmann, Stefan Maierhofer
Consolidation of Multiple Depth Maps
In IEEE Workshop on Consumer Depth Cameras for Computer Vision (CDC4CV 2011). November 2011.
Information
- Publication Type: Conference Paper
- Workgroup(s)/Project(s):
- Date: November 2011
- Location: Barcelona
- Lecturer: Irene Reisner-Kollmann
- Booktitle: IEEE Workshop on Consumer Depth Cameras for Computer Vision (CDC4CV 2011)
Abstract
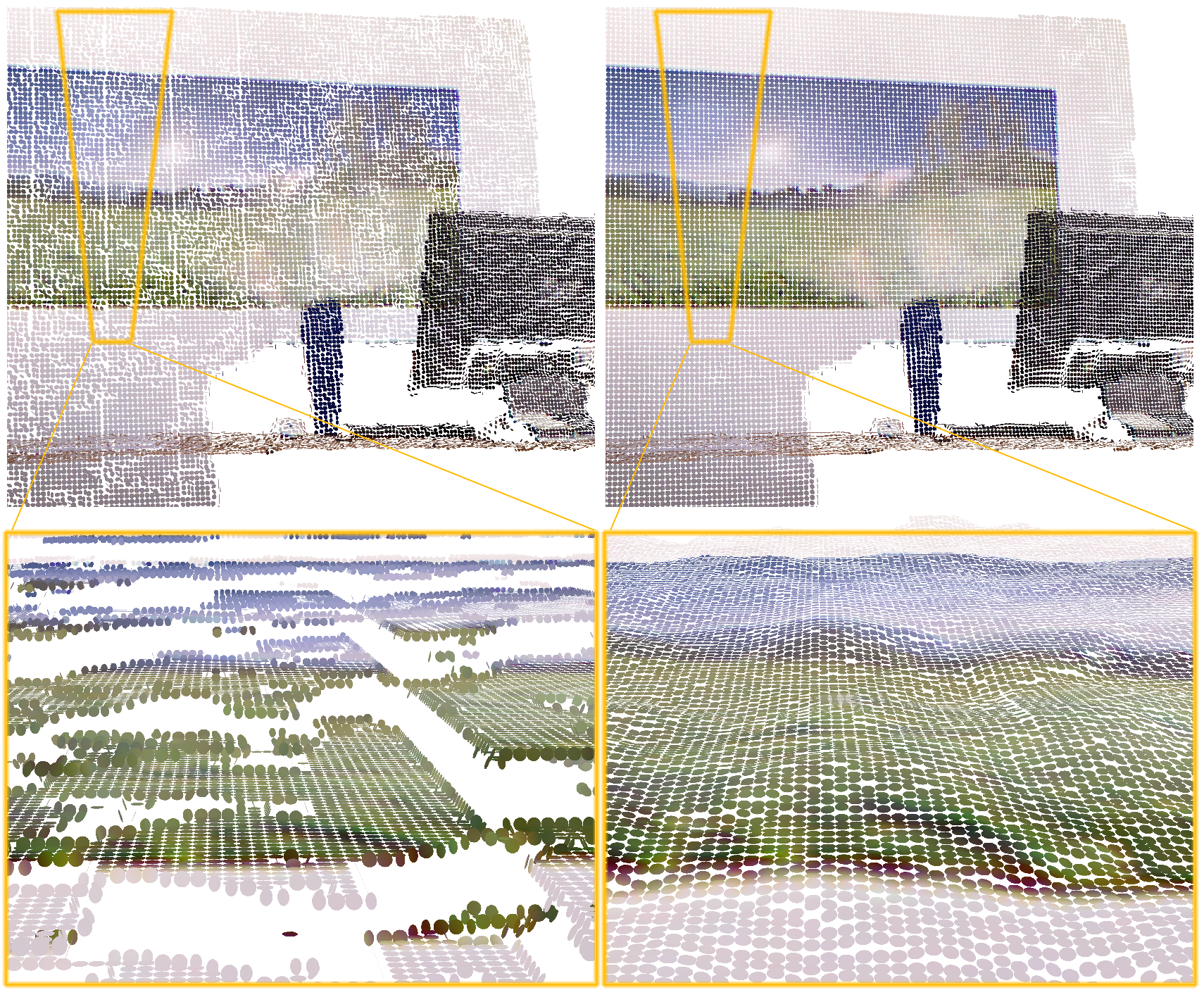
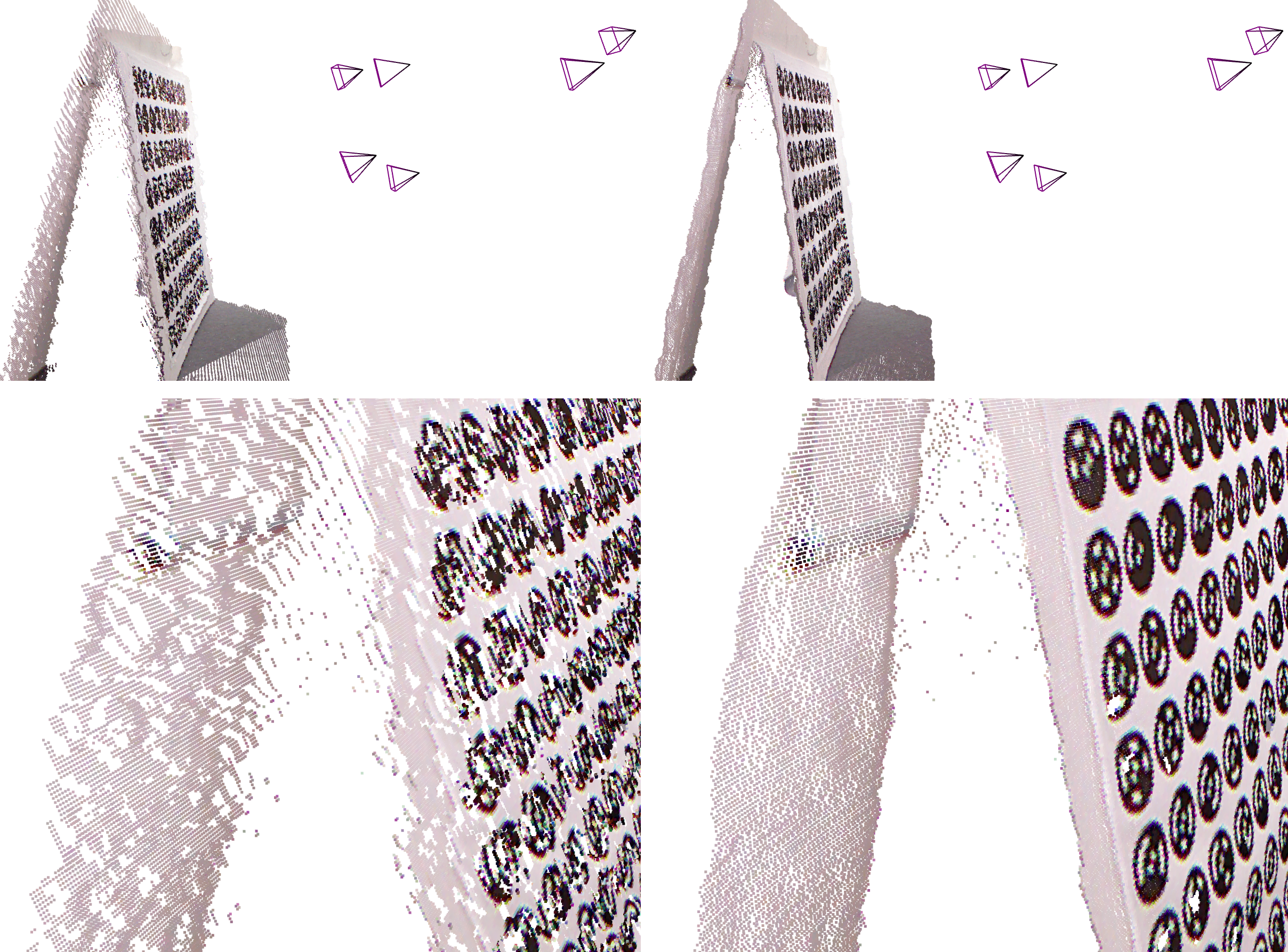
Consolidation of point clouds, including denoising, outlier removal and normal estimation, is an important pre-processing step for surface reconstruction techniques. We present a consolidation framework specialized on point clouds created by multiple frames of a depth camera. An adaptive view-dependent locally optimal projection operator denoises multiple depth maps while keeping their struc ture in two-dimensional grids. Depth cameras produce a systematic variation of noise scales along the depth axis. Adapting to different noise scales allows to remove noise in the point cloud and preserve well-defined details at the same time. Our framework provides additional consolidation steps for depth maps like normal estimation and outlier removal. We show how knowledge about the distribution of noise in the input data can be effectively used for improving point clouds.Additional Files and Images


Weblinks
No further information available.BibTeX
@inproceedings{reisner-2011-comdm,
title = "Consolidation of Multiple Depth Maps",
author = "Irene Reisner-Kollmann and Stefan Maierhofer",
year = "2011",
abstract = "Consolidation of point clouds, including denoising, outlier
removal and normal estimation, is an important
pre-processing step for surface reconstruction techniques.
We present a consolidation framework specialized on point
clouds created by multiple frames of a depth camera. An
adaptive view-dependent locally optimal projection operator
denoises multiple depth maps while keeping their struc ture
in two-dimensional grids. Depth cameras produce a systematic
variation of noise scales along the depth axis. Adapting to
different noise scales allows to remove noise in the point
cloud and preserve well-defined details at the same time.
Our framework provides additional consolidation steps for
depth maps like normal estimation and outlier removal. We
show how knowledge about the distribution of noise in the
input data can be effectively used for improving point
clouds.",
month = nov,
location = "Barcelona",
booktitle = "IEEE Workshop on Consumer Depth Cameras for Computer Vision
(CDC4CV 2011)",
URL = "https://www.cg.tuwien.ac.at/research/publications/2011/reisner-2011-comdm/",
}