

Felix Kendlbacher
Introduction Of OpenStreetMap For The Automatic Generation Of Destination Maps
[ thesis]
thesis]
Information
- Publication Type: Bachelor Thesis
- Workgroup(s)/Project(s):
- Date: 2016
- Date (Start): 2015
- Date (End): 2016
- Matrikelnummer: 1128051
- First Supervisor: Michael Wimmer

- Second Supervisor: Michael Birsak
- Keywords: Destination Maps, OpenStreetMap
Abstract
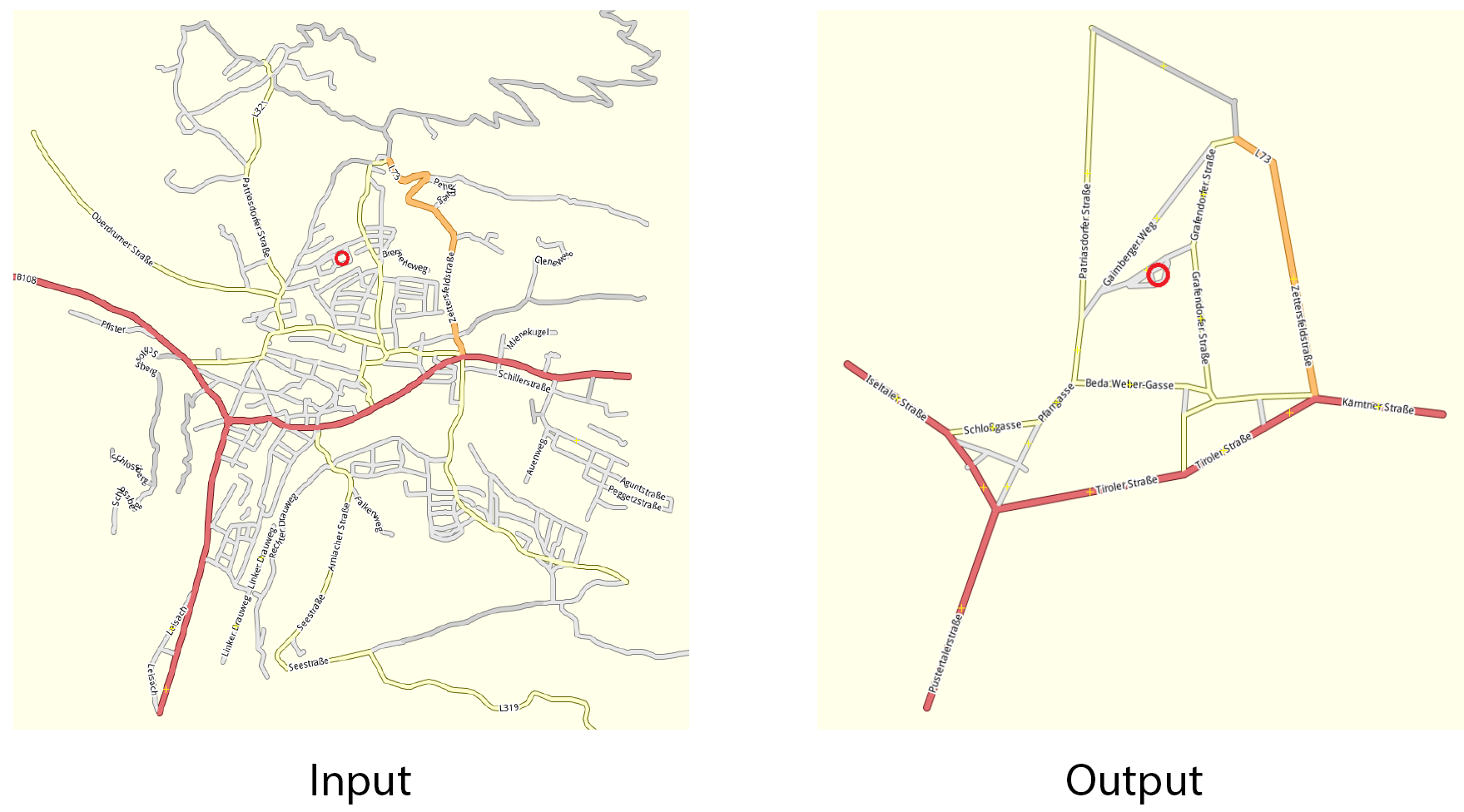
A destination map allows all travelers, within the given region of interest, to reach the same destination, no matter where exactly they start their journey at. For this purpose the important roads for traversing the road network are chosen, while the non-important roads are removed for clarity. These selected roads are then simplified to reduce unnecessary complexity, while maintaining the structure of the road network. The chosen data is then tweaked to increase the visibility of the small roads. During this process the layout is iteratively changed and evaluated according to certain aspects, and if a newly proposed layout performs better than the old one, that new one forms the basis for all future changes. In this work a method for automatically creating destination maps is implemented based on the algorithm proposed in the paper by Kopf et al. [KAB+10], with efforts made to improve the original work.Additional Files and Images

Weblinks
No further information available.BibTeX
@bachelorsthesis{kendlbacher-2016,
title = "Introduction Of OpenStreetMap For The Automatic Generation
Of Destination Maps",
author = "Felix Kendlbacher",
year = "2016",
abstract = "A destination map allows all travelers, within the given
region of interest, to reach the same destination, no matter
where exactly they start their journey at. For this purpose
the important roads for traversing the road network are
chosen, while the non-important roads are removed for
clarity. These selected roads are then simplified to reduce
unnecessary complexity, while maintaining the structure of
the road network. The chosen data is then tweaked to
increase the visibility of the small roads. During this
process the layout is iteratively changed and evaluated
according to certain aspects, and if a newly proposed layout
performs better than the old one, that new one forms the
basis for all future changes. In this work a method for
automatically creating destination maps is implemented based
on the algorithm proposed in the paper by Kopf et al.
[KAB+10], with efforts made to improve the original work.",
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Institute of Computer Graphics and Algorithms, Vienna
University of Technology ",
keywords = "Destination Maps, OpenStreetMap",
URL = "https://www.cg.tuwien.ac.at/research/publications/2016/kendlbacher-2016/",
}