

Shaojun Hu, Zhengrong Li, Zhiyi Zhang, Dongijan He, Michael Wimmer
Efficient Tree Modeling from Airborne LiDAR Point Clouds
Computers & Graphics, 67:1-13, October 2017. [ draft]
draft]
Information
- Publication Type: Journal Paper (without talk)
- Workgroup(s)/Project(s):
- Date: October 2017
- ISSN: 0097-8493
- Journal: Computers & Graphics
- Volume: 67
- Pages: 1 – 13
- Keywords: tree modeling, LIDAR, point clouds
Abstract
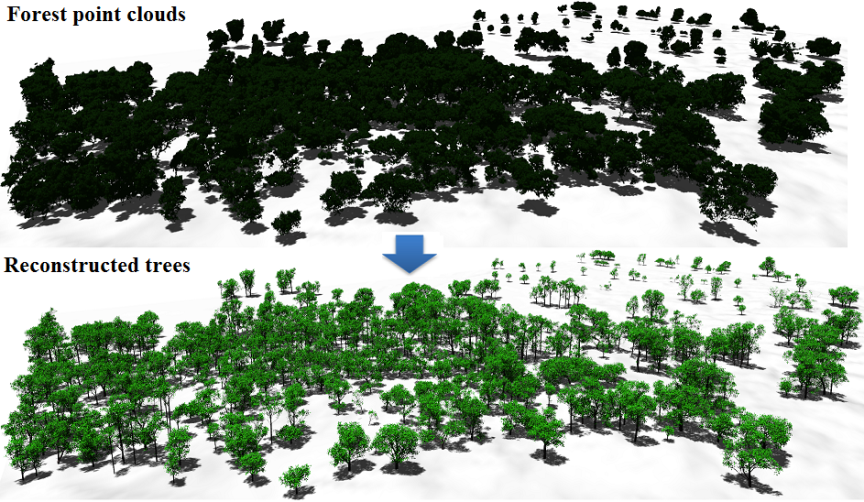
Modeling real-world trees is important in many application areas, including computer graphics, botany and forestry. An example of a modeling method is reconstruction from light detection and ranging (LiDAR) scans. In contrast to terrestrial LiDAR systems, airborne LiDAR systems – even current high-resolution systems – capture only very few samples on tree branches, which makes the reconstruction of trees from airborne LiDAR a challenging task. In this paper, we present a new method to model plausible trees with fine details from airborne LiDAR point clouds. To reconstruct tree models, first, we use a normalized cut method to segment an individual tree point cloud. Then, trunk points are added to supplement the incomplete point cloud, and a connected graph is constructed by searching sufficient nearest neighbors for each point. Based on the observation of real-world trees, a direction field is created to restrict branch directions. Then, branch skeletons are constructed using a bottom-up greedy algorithm with a priority queue, and leaves are arranged according to phyllotaxis. We demonstrate our method on a variety of examples and show that it can generate a plausible tree model in less than one second, in addition to preserving features of the original point cloud.Additional Files and Images

Weblinks
No further information available.BibTeX
@article{HU-2017-ETM,
title = "Efficient Tree Modeling from Airborne LiDAR Point Clouds",
author = "Shaojun Hu and Zhengrong Li and Zhiyi Zhang and Dongijan He
and Michael Wimmer",
year = "2017",
abstract = "Modeling real-world trees is important in many application
areas, including computer graphics, botany and forestry. An
example of a modeling method is reconstruction from light
detection and ranging (LiDAR) scans. In contrast to
terrestrial LiDAR systems, airborne LiDAR systems – even
current high-resolution systems – capture only very few
samples on tree branches, which makes the reconstruction of
trees from airborne LiDAR a challenging task. In this paper,
we present a new method to model plausible trees with fine
details from airborne LiDAR point clouds. To reconstruct
tree models, first, we use a normalized cut method to
segment an individual tree point cloud. Then, trunk points
are added to supplement the incomplete point cloud, and a
connected graph is constructed by searching sufficient
nearest neighbors for each point. Based on the observation
of real-world trees, a direction field is created to
restrict branch directions. Then, branch skeletons are
constructed using a bottom-up greedy algorithm with a
priority queue, and leaves are arranged according to
phyllotaxis. We demonstrate our method on a variety of
examples and show that it can generate a plausible tree
model in less than one second, in addition to preserving
features of the original point cloud.",
month = oct,
issn = "0097-8493",
journal = "Computers & Graphics",
volume = "67",
pages = "1--13",
keywords = "tree modeling, LIDAR, point clouds",
URL = "https://www.cg.tuwien.ac.at/research/publications/2017/HU-2017-ETM/",
}