

 thesis
thesisInformation
- Publication Type: Bachelor Thesis
- Workgroup(s)/Project(s):
- Date: August 2017
- Date (Start): 17. June 2016
- Date (End): 28. August 2017
- Matrikelnummer: 01325103
- Note: 1
- First Supervisor: Stefan Ohrhallinger

- Second Supervisor: Michael Wimmer
- Keywords: noise model, surface reconstruction, sensor noise
Abstract
With the growing number of consumer-oriented depth sensors like the Kinect or the newly released Phab2Pro, the question of how precise these sensors are arises. In this thesis we want to evaluate the average noise in the generated depth measurements in both the axial direction and the lateral directions. As part of a two-part project this thesis will view the noise’s development with varying distance and angle. Finally, we will present and evaluate two models describing the noise behavior, with the first being derived from solely this thesis’ measurements and the second one being a combination of the previous model and a model of a colleague. This derived models can be used in a post-processing step to filter the generated depth images.Additional Files and Images
Additional images and videos
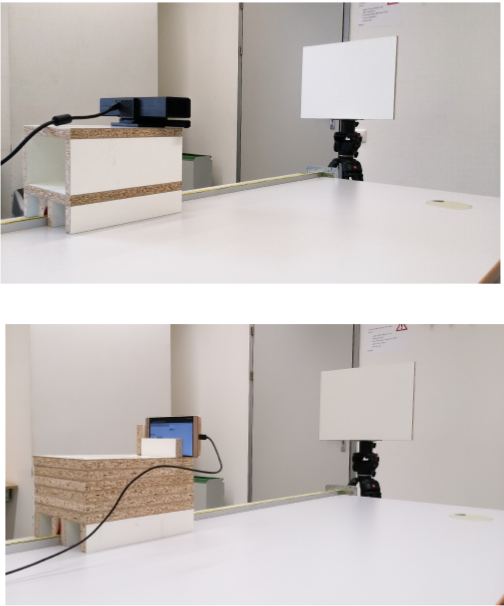 image:
Kinect v2 and Phab2Pro noise model evaluation
image:
Kinect v2 and Phab2Pro noise model evaluation
Additional files
 thesis:
Bachelor thesis
thesis:
Bachelor thesis
Weblinks
No further information available.BibTeX
@bachelorsthesis{grossmann-2016-baa,
title = "Extracting Sensor Specific Noise Models",
author = "Nicolas Grossmann",
year = "2017",
abstract = "With the growing number of consumer-oriented depth sensors
like the Kinect or the newly released Phab2Pro, the question
of how precise these sensors are arises. In this thesis we
want to evaluate the average noise in the generated depth
measurements in both the axial direction and the lateral
directions. As part of a two-part project this thesis will
view the noise’s development with varying distance and
angle. Finally, we will present and evaluate two models
describing the noise behavior, with the first being derived
from solely this thesis’ measurements and the second one
being a combination of the previous model and a model of a
colleague. This derived models can be used in a
post-processing step to filter the generated depth images.",
month = aug,
note = "1",
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Institute of Computer Graphics and Algorithms, Vienna
University of Technology ",
keywords = "noise model, surface reconstruction, sensor noise",
URL = "https://www.cg.tuwien.ac.at/research/publications/2017/grossmann-2016-baa/",
}