

Markus Schütz , Michael Wimmer
, Michael Wimmer
Progressive Real-Time Rendering of Unprocessed Point Clouds
Poster shown at ACM SIGGRAPH 2018
(12. August 2018-16. August 2018)
[ abstract] [
abstract] [ poster]
poster]
Information
- Publication Type: Poster
- Workgroup(s)/Project(s):
- Date: August 2018
- Publisher: ACM
- Location: Vancouver, Canada
- ISBN: 978-1-4503-5817-0/18/08
- Event: ACM SIGGRAPH 2018
- DOI: 10.1145/3230744.3230816
- Call for Papers: Call for Paper
- Conference date: 12. August 2018 – 16. August 2018
- Pages: Article 41 –
- Keywords: point based rendering, point cloud, LIDAR
Abstract
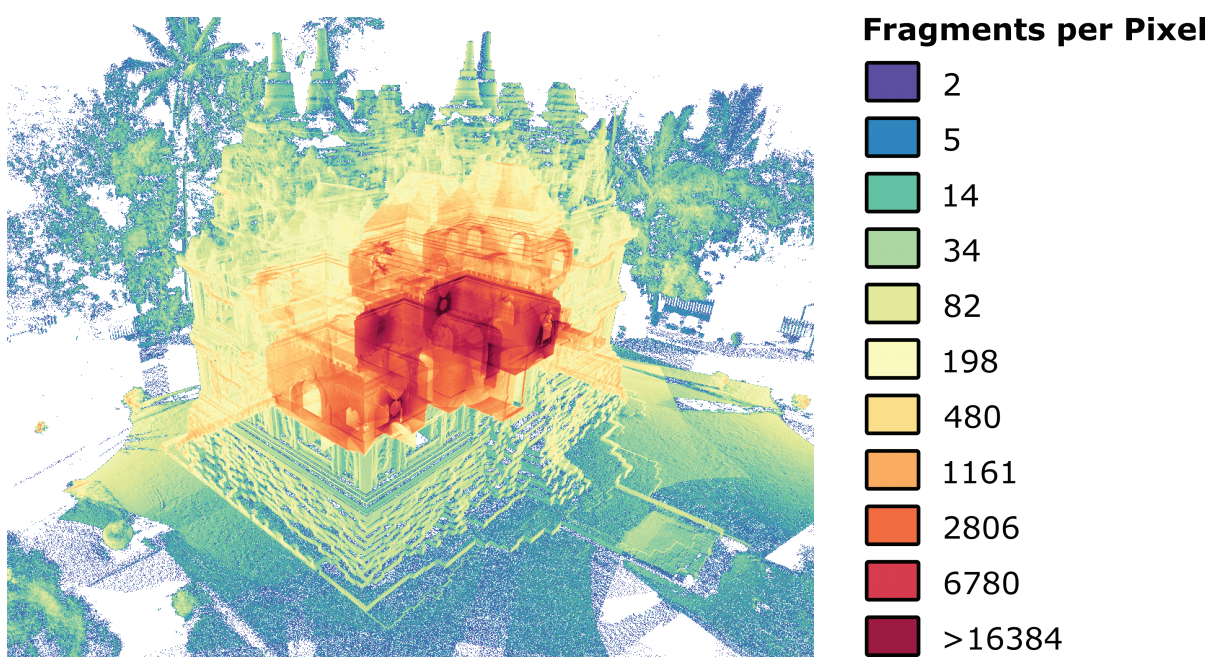
Rendering tens of millions of points in real time usually requires either high-end graphics cards, or the use of spatial acceleration structures. We introduce a method to progressively display as many points as the GPU memory can hold in real time by reprojecting what was visible and randomly adding additional points to uniformly converge towards the full result within a few frames.Our method heavily limits the number of points that have to be rendered each frame and it converges quickly and in a visually pleasing way, which makes it suitable even for notebooks with low-end GPUs. The data structure consists of a randomly shuffled array of points that is incrementally generated on-the-fly while points are being loaded.
Due to this, it can be used to directly view point clouds in common sequential formats such as LAS or LAZ while they are being loaded and without the need to generate spatial acceleration structures in advance, as long as the data fits into GPU memory.
Additional Files and Images


Weblinks
BibTeX
@misc{schuetz-2018-PPC,
title = "Progressive Real-Time Rendering of Unprocessed Point Clouds",
author = "Markus Sch\"{u}tz and Michael Wimmer",
year = "2018",
abstract = "Rendering tens of millions of points in real time usually
requires either high-end graphics cards, or the use of
spatial acceleration structures. We introduce a method to
progressively display as many points as the GPU memory can
hold in real time by reprojecting what was visible and
randomly adding additional points to uniformly converge
towards the full result within a few frames. Our method
heavily limits the number of points that have to be rendered
each frame and it converges quickly and in a visually
pleasing way, which makes it suitable even for notebooks
with low-end GPUs. The data structure consists of a
randomly shuffled array of points that is incrementally
generated on-the-fly while points are being loaded. Due
to this, it can be used to directly view point clouds in
common sequential formats such as LAS or LAZ while they are
being loaded and without the need to generate spatial
acceleration structures in advance, as long as the data fits
into GPU memory.",
month = aug,
publisher = "ACM",
location = "Vancouver, Canada",
isbn = "978-1-4503-5817-0/18/08",
event = "ACM SIGGRAPH 2018",
doi = "10.1145/3230744.3230816",
Conference date = "Poster presented at ACM SIGGRAPH 2018
(2018-08-12--2018-08-16)",
note = "Article 41--",
pages = "Article 41 – ",
keywords = "point based rendering, point cloud, LIDAR",
URL = "https://www.cg.tuwien.ac.at/research/publications/2018/schuetz-2018-PPC/",
}