

 Master Thesis
Master ThesisInformation
- Publication Type: Master Thesis
- Workgroup(s)/Project(s):
- Date: April 2020
- Date (Start): March 2019
- Date (End): 21. April 2020
- TU Wien Library:
- Diploma Examination: May 2020
- Open Access: yes
- First Supervisor: Eduard Gröller

- Keywords: Mobility rehabilitation, Electroencephalography
Abstract
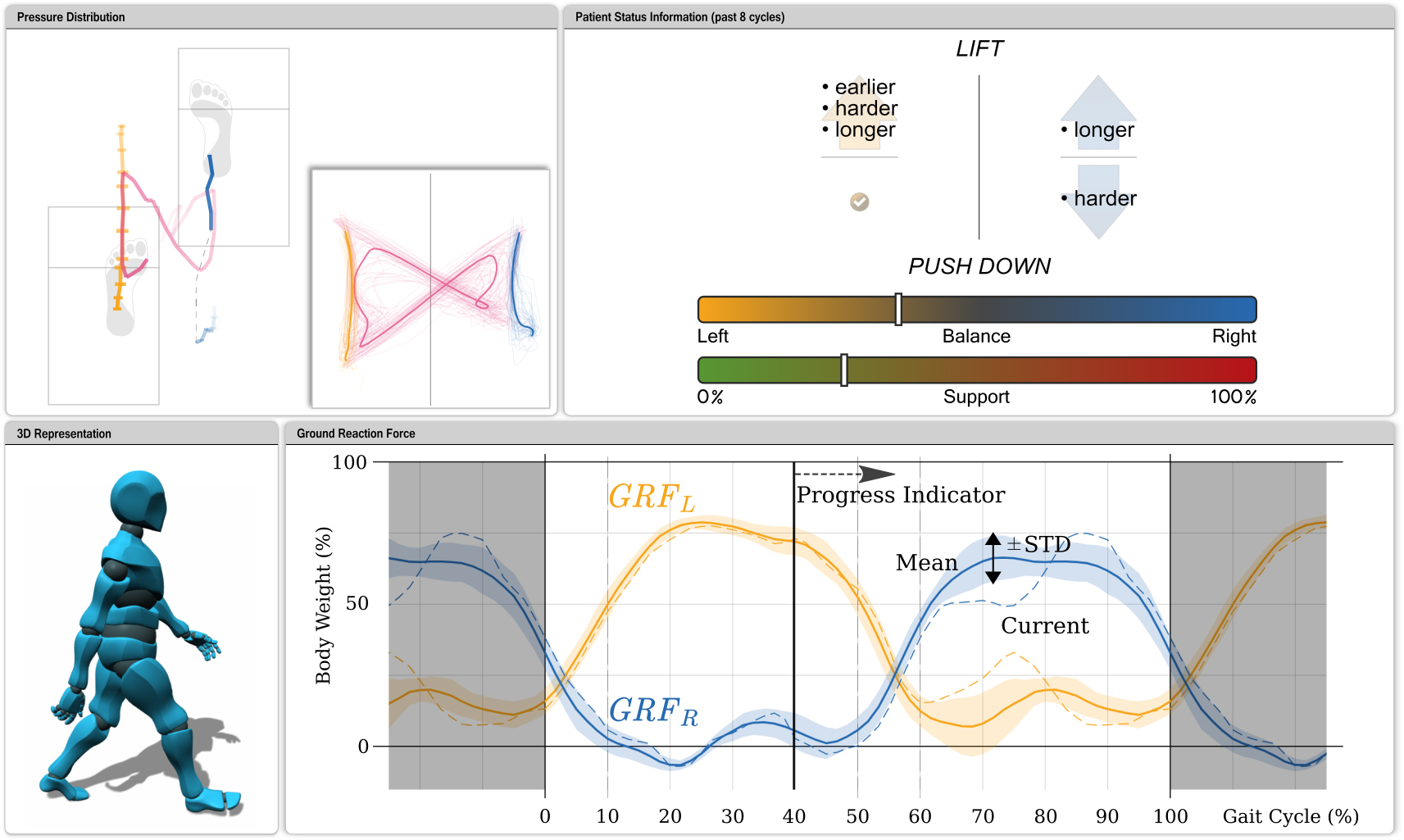
Mobility impairment in adults is one of most prevalent types of disabilities in developed countries. Gait rehabilitation can be used to regain some or all motor functions, especially after a stroke. In recent years, robot-assisted gait training attracted increasing interest in rehabilitation facilities and scientific research. With this advent of robotic recovery comes the need to objectively measure the patient’s performance. Physiotherapists need essential information about the current status during training and how to improve the patient’s gait, presented in an easy to grasp and compact form. On the other hand, physicians rely on statistical measures in order to evaluate the patient’s progress throughout the therapy. This thesis discusses commonly used visualizations and statistics while proposing improvements and adaptations in the context of PerPedes, a novel robotic gait rehabilitation device. In order to measure the patient’s performance, a new algorithm for gait event detection was developed, based on force data from pressure plates. The following work demonstrates that standard algorithms fail with PerPedes, while the proposed solution can robustly handle highly distorted gait patterns, such as hemiplegic gait, foot drop, or walking backwards. The software application developed during this thesis provides feedback to the therapist and generates suggestions for gait improvement. Furthermore, gait statistics are inferred from each therapy session and collected in order to be used for future analysis and inter-patient comparison.Additional Files and Images


Weblinks
BibTeX
@mastersthesis{Spelitz2020,
title = "BrainGait: Gait Event Detection and Visualization for
Robotic Rehabilitation",
author = "Stefan Spelitz",
year = "2020",
abstract = "Mobility impairment in adults is one of most prevalent types
of disabilities in developed countries. Gait rehabilitation
can be used to regain some or all motor functions,
especially after a stroke. In recent years, robot-assisted
gait training attracted increasing interest in
rehabilitation facilities and scientific research. With this
advent of robotic recovery comes the need to objectively
measure the patient’s performance. Physiotherapists need
essential information about the current status during
training and how to improve the patient’s gait, presented
in an easy to grasp and compact form. On the other hand,
physicians rely on statistical measures in order to evaluate
the patient’s progress throughout the therapy. This thesis
discusses commonly used visualizations and statistics while
proposing improvements and adaptations in the context of
PerPedes, a novel robotic gait rehabilitation device. In
order to measure the patient’s performance, a new
algorithm for gait event detection was developed, based on
force data from pressure plates. The following work
demonstrates that standard algorithms fail with PerPedes,
while the proposed solution can robustly handle highly
distorted gait patterns, such as hemiplegic gait, foot drop,
or walking backwards. The software application developed
during this thesis provides feedback to the therapist and
generates suggestions for gait improvement. Furthermore,
gait statistics are inferred from each therapy session and
collected in order to be used for future analysis and
inter-patient comparison.",
month = apr,
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Research Unit of Computer Graphics, Institute of Visual
Computing and Human-Centered Technology, Faculty of
Informatics, TU Wien",
keywords = "Mobility rehabilitation, Electroencephalography",
URL = "https://www.cg.tuwien.ac.at/research/publications/2020/Spelitz2020/",
}