

Philipp Erler , Paul Guerrero, Stefan Ohrhallinger, Michael Wimmer, Niloy Mitra
, Paul Guerrero, Stefan Ohrhallinger, Michael Wimmer, Niloy Mitra
Points2Surf: Learning Implicit Surfaces from Point Clouds
In Computer Vision -- ECCV 2020, pages 108-124. October 2020.
[ points2surf_paper] [
points2surf_paper] [ short video]
short video]
Information
- Publication Type: Conference Paper
- Workgroup(s)/Project(s):
- Date: October 2020
- ISBN: 978-3-030-58558-7
- Series: Lecture Notes in Computer Science
- Publisher: Springer International Publishing
- Open Access: yes
- Location: Glasgow, UK (online)
- Lecturer: Philipp Erler
- Address: Cham
- Event: ECCV 2020
- Editor: Vedaldi, Andrea and Bischof, Horst and Brox, Thomas and Frahm, Jan-Michael
- DOI: 10.1007/978-3-030-58558-7_7
- Call for Papers: Call for Paper
- Booktitle: Computer Vision -- ECCV 2020
- Journal: Computer Vision – ECCV 2020
- Pages: 17
- Volume: 12350
- Conference date: 24. August 2020 – 27. August 2020
- Pages: 108 – 124
- Keywords: surface reconstruction, implicit surfaces, point clouds, patch-based, local and global, deep learning, generalization
Abstract
A key step in any scanning-based asset creation workflow is to convert unordered point clouds to a surface. Classical methods (e.g., Poisson reconstruction) start to degrade in the presence of noisy and partial scans. Hence, deep learning based methods have recently been proposed to produce complete surfaces, even from partial scans. However, such data-driven methods struggle to generalize to new shapes with large geometric and topological variations. We present Points2Surf, a novel patch-based learning framework that produces accurate surfaces directly from raw scans without normals.Learning a prior over a combination of detailed local patches and coarse global information improves generalization performance and reconstruction accuracy.
Our extensive comparison on both synthetic and real data demonstrates a clear advantage of our method over state-of-the-art alternatives on previously unseen classes (on average, Points2Surf brings down reconstruction error by 30% over SPR and by 270%+ over deep learning based SotA methods) at the cost of longer computation times and a slight increase in small-scale topological noise in some cases. Our source code, pre-trained model, and dataset are available on: https://github.com/ErlerPhilipp/points2surf
Additional Files and Images
Additional images and videos
 long video:
8 min video for ECCV 2020
long video:
8 min video for ECCV 2020
 short video:
2 min video for ECCV 2020
teaser:
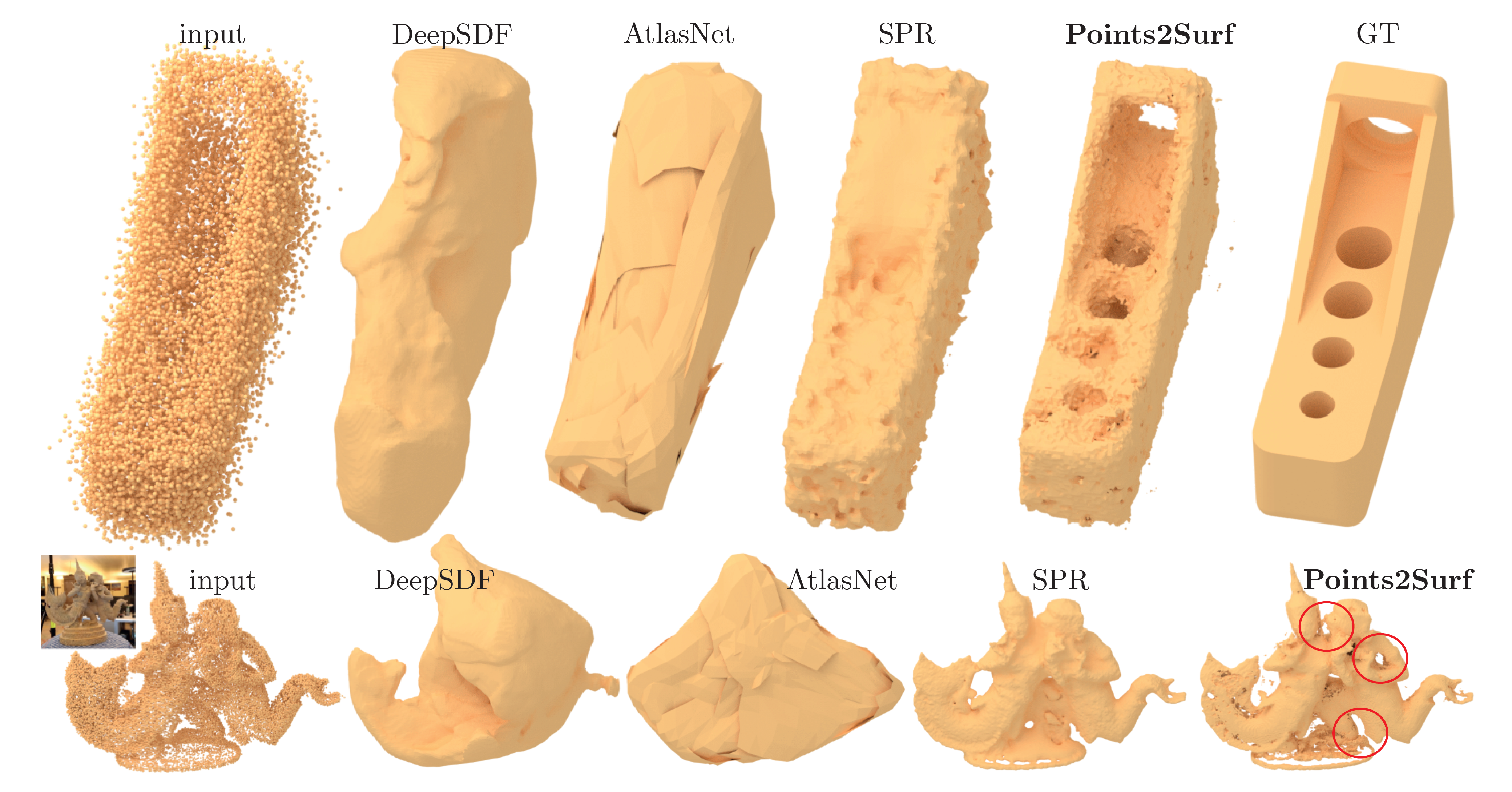
We present Points2Surf, a method to reconstruct an accurate implicit surface from a noisy point cloud. Unlike current data-driven surface reconstruction methods like DeepSDF and AtlasNet, it is patch-based, improves detail reconstruction, and unlike Screened Poisson Reconstruction (SPR), a learned prior of low-level patch shapes improves reconstruction accuracy.
Note the quality of reconstructions, both geometric and topological, against the original surfaces. The ability of Points2Surf to generalize to new shapes makes it the first learning-based approach with significant generalization ability under both geometric and topological variations.
short video:
2 min video for ECCV 2020
teaser:
We present Points2Surf, a method to reconstruct an accurate implicit surface from a noisy point cloud. Unlike current data-driven surface reconstruction methods like DeepSDF and AtlasNet, it is patch-based, improves detail reconstruction, and unlike Screened Poisson Reconstruction (SPR), a learned prior of low-level patch shapes improves reconstruction accuracy.
Note the quality of reconstructions, both geometric and topological, against the original surfaces. The ability of Points2Surf to generalize to new shapes makes it the first learning-based approach with significant generalization ability under both geometric and topological variations.
Additional files
 points2surf_paper:
Points2Surf paper (Arxiv version)
points2surf_paper:
Points2Surf paper (Arxiv version)
Weblinks
- Github Repo
Access the source code, pre-trained models and datasets from Github. - Arxiv Pre-Print
Access the paper pre-print on arXiv. - Official Publication
Access the paper Springer Link. - Entry in reposiTUm (TU Wien Publication Database)
- DOI: 10.1007/978-3-030-58558-7_7
BibTeX
@inproceedings{erler-2020-p2s,
title = "Points2Surf: Learning Implicit Surfaces from Point Clouds",
author = "Philipp Erler and Paul Guerrero and Stefan Ohrhallinger and
Michael Wimmer and Niloy Mitra",
year = "2020",
abstract = "A key step in any scanning-based asset creation workflow is
to convert unordered point clouds to a surface. Classical
methods (e.g., Poisson reconstruction) start to degrade in
the presence of noisy and partial scans. Hence, deep
learning based methods have recently been proposed to
produce complete surfaces, even from partial scans. However,
such data-driven methods struggle to generalize to new
shapes with large geometric and topological variations. We
present Points2Surf, a novel patch-based learning framework
that produces accurate surfaces directly from raw scans
without normals. Learning a prior over a combination of
detailed local patches and coarse global information
improves generalization performance and reconstruction
accuracy. Our extensive comparison on both synthetic and
real data demonstrates a clear advantage of our method over
state-of-the-art alternatives on previously unseen classes
(on average, Points2Surf brings down reconstruction error by
30% over SPR and by 270%+ over deep learning based SotA
methods) at the cost of longer computation times and a
slight increase in small-scale topological noise in some
cases. Our source code, pre-trained model, and dataset are
available on: https://github.com/ErlerPhilipp/points2surf ",
month = oct,
isbn = "978-3-030-58558-7",
series = "Lecture Notes in Computer Science",
publisher = "Springer International Publishing",
location = "Glasgow, UK (online)",
address = "Cham",
event = "ECCV 2020",
editor = "Vedaldi, Andrea and Bischof, Horst and Brox, Thomas and
Frahm, Jan-Michael",
doi = "10.1007/978-3-030-58558-7_7",
booktitle = "Computer Vision -- ECCV 2020",
journal = "Computer Vision – ECCV 2020",
pages = "17",
volume = "12350",
pages = "108--124",
keywords = "surface reconstruction, implicit surfaces, point clouds,
patch-based, local and global, deep learning, generalization",
URL = "https://www.cg.tuwien.ac.at/research/publications/2020/erler-2020-p2s/",
}