Information
- Publication Type: Master Thesis
- Workgroup(s)/Project(s):
- Date: March 2021
- Date (Start): 2020
- Date (End): 2021
- TU Wien Library:
- Diploma Examination: 14. April 2021
- Note: 1
- Open Access: yes
- First Supervisor: Werner Purgathofer

Abstract
LiDAR devices are able to capture the physical world very accurately. Therefore, they
are often used for 3D reconstruction. Unfortunately, such data can become extremely
large very quickly and usually only a small part of the point cloud is of interest. Thus,
the point cloud is filtered beforehand in order to apply algorithms only on those points
that are relevant for it. A semantic information about the points can be used for such a
filtering. Semantic segmentation of point clouds is a popular field of research and here
there has been a trend towards deep learning in recent years too. However, contrary to
images, point clouds are unstructured. Hence, point clouds are often rasterized, but this
has to be done, such that the underlying structure is represented well.
In this thesis, a 3D Convolutional Neural Network is developed and trained for a semantic
segmentation of LiDAR point clouds. Thereby, a point cloud is represented with an
octree data structure, which makes it easy to rasterize only relevant parts. Since, just
dense parts of the point cloud, in which important information about the structure is
located, are subdivided further. This allows to simply take nodes of a certain level of the
octree and rasterize them as data samples.
There are many application areas for 3D reconstructions based on point clouds. In an
urban scenario, these can be for example whole city models or buildings. However, in this
thesis, the reconstruction of sidewalks is explored. Since, for flood simulations in cities, an
increase in height of a few centimeters can make a great difference and information about
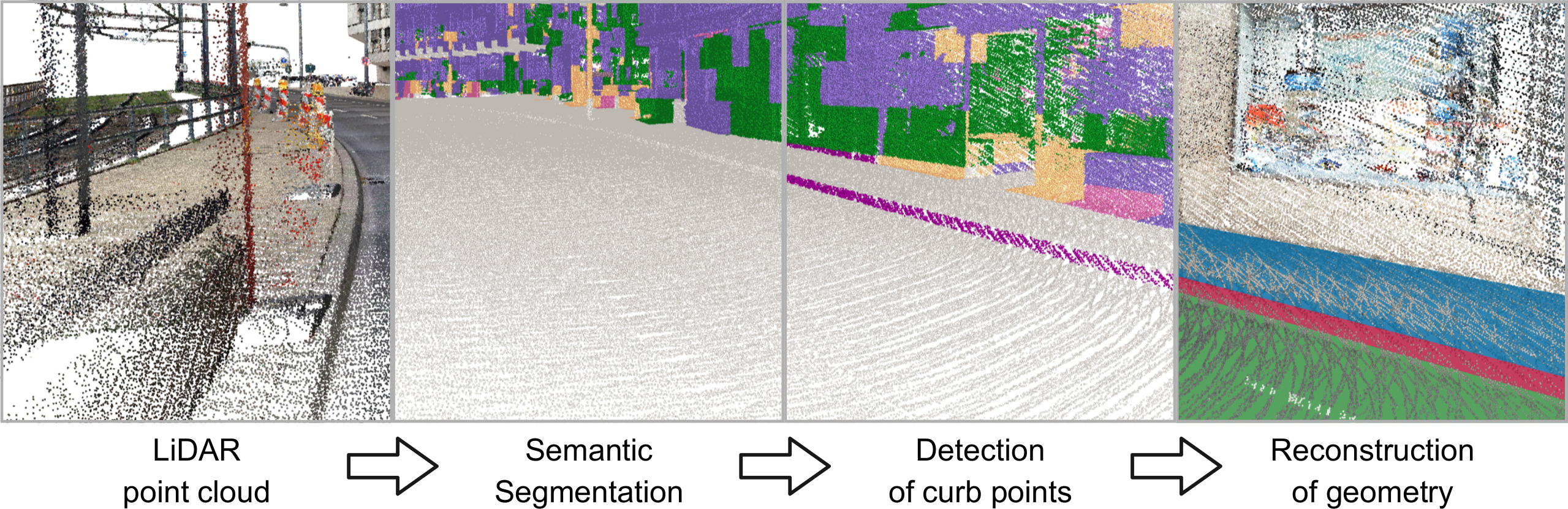
the curb geometry helps to make them more accurate. In the sidewalk reconstruction
process, the point cloud is filtered first, based on a semantic segmentation of a 3D CNN,
and then point cloud features are calculated to detect curb points. With these curb
points, the geometry of the curb, sidewalk and street are computed.
Taken all together, this thesis develops a proof-of-concept prototype for semantic point
cloud segmentation using 3D CNNs and based on that, a curb detection and reconstruction
algorithm.
Additional Files and Images
Additional images and videos
Additional files
Weblinks
No further information available.
BibTeX
@mastersthesis{Kellner-2021-DA,
title = "Klassifikation Urbaner Punktwolken Mittels 3D CNNs In
Kombination mit Rekonstruktion von Gehsteigen",
author = "Lisa-Maria Kellner",
year = "2021",
abstract = "LiDAR devices are able to capture the physical world very
accurately. Therefore, they are often used for 3D
reconstruction. Unfortunately, such data can become
extremely large very quickly and usually only a small part
of the point cloud is of interest. Thus, the point cloud is
filtered beforehand in order to apply algorithms only on
those points that are relevant for it. A semantic
information about the points can be used for such a
filtering. Semantic segmentation of point clouds is a
popular field of research and here there has been a trend
towards deep learning in recent years too. However, contrary
to images, point clouds are unstructured. Hence, point
clouds are often rasterized, but this has to be done, such
that the underlying structure is represented well. In this
thesis, a 3D Convolutional Neural Network is developed and
trained for a semantic segmentation of LiDAR point clouds.
Thereby, a point cloud is represented with an octree data
structure, which makes it easy to rasterize only relevant
parts. Since, just dense parts of the point cloud, in which
important information about the structure is located, are
subdivided further. This allows to simply take nodes of a
certain level of the octree and rasterize them as data
samples. There are many application areas for 3D
reconstructions based on point clouds. In an urban scenario,
these can be for example whole city models or buildings.
However, in this thesis, the reconstruction of sidewalks is
explored. Since, for flood simulations in cities, an
increase in height of a few centimeters can make a great
difference and information about the curb geometry helps to
make them more accurate. In the sidewalk reconstruction
process, the point cloud is filtered first, based on a
semantic segmentation of a 3D CNN, and then point cloud
features are calculated to detect curb points. With these
curb points, the geometry of the curb, sidewalk and street
are computed. Taken all together, this thesis develops a
proof-of-concept prototype for semantic point cloud
segmentation using 3D CNNs and based on that, a curb
detection and reconstruction algorithm.",
month = mar,
note = "1",
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Research Unit of Computer Graphics, Institute of Visual
Computing and Human-Centered Technology, Faculty of
Informatics, TU Wien",
URL = "https://www.cg.tuwien.ac.at/research/publications/2021/Kellner-2021-DA/",
}