

Stefan Zaufl
Agent Based Pedestrian Simulation in Visdom
[Image] [ Master Thesis] [
Master Thesis] [ Poster] [
Poster] [ thesis]
thesis]
Information
- Publication Type: Master Thesis
- Workgroup(s)/Project(s):
- Date: November 2021
- Date (Start): 21. August 2020
- Date (End): 27. November 2021
- TU Wien Library: AC16454248
- Diploma Examination: 27. November 2021
- Open Access: yes
- First Supervisor: Eduard Gröller

- Pages: 112
- Keywords: pedestrian simulation, visualization
Abstract
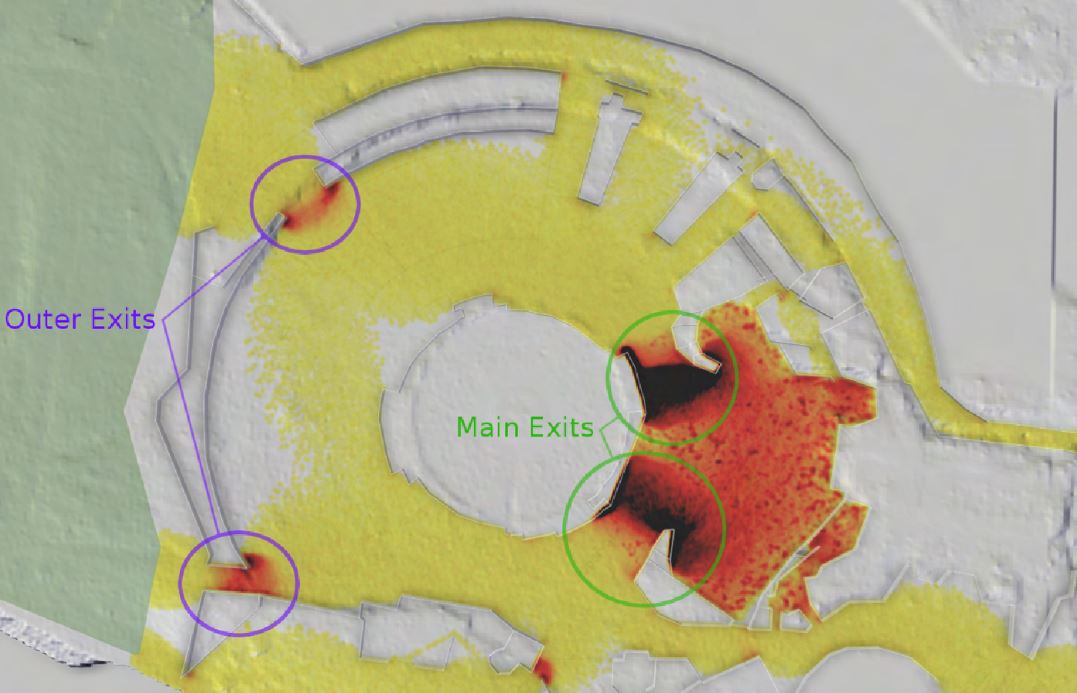
In this thesis a new pedestrian simulation plugin for the Visdom visualization system is presented. First the general layout of such a system is discussed using a layered system. Different candidates for these layers are presented and the best fitting one for the use are picked. For the tactical layer a fastest-path algorithm is used whilst for the operational layer a modified ORCA (Optimal Reciprocal Collision Avoidance) algorithm has been implemented. These will be discussed in detail. We will also talk about the visualization of the simulation state. Both the kind of representation for different objects in the world, as well as additional visualizations that aim to help the operator to gain insight, are going to be presented. Then the implementation itself is going to be discussed. Especially how the different layers are integrated into the Visdom application. In the last chapter the results are presented. First the system will be validated using the RiMEA test cases and then a real world case study showcases the capabilities of the proposed system.Additional Files and Images



Weblinks
- Entry in reposiTUm (TU Wien Publication Database)
- CatalogPlus (TU Wien Library)
- DOI: 10.34726/hss.2022.48167
BibTeX
@mastersthesis{Zaufel_2021,
title = "Agent Based Pedestrian Simulation in Visdom",
author = "Stefan Zaufl",
year = "2021",
abstract = "In this thesis a new pedestrian simulation plugin for the
Visdom visualization system is presented. First the general
layout of such a system is discussed using a layered system.
Different candidates for these layers are presented and the
best fitting one for the use are picked. For the tactical
layer a fastest-path algorithm is used whilst for the
operational layer a modified ORCA (Optimal Reciprocal
Collision Avoidance) algorithm has been implemented. These
will be discussed in detail. We will also talk about the
visualization of the simulation state. Both the kind of
representation for different objects in the world, as well
as additional visualizations that aim to help the operator
to gain insight, are going to be presented. Then the
implementation itself is going to be discussed. Especially
how the different layers are integrated into the Visdom
application. In the last chapter the results are presented.
First the system will be validated using the RiMEA test
cases and then a real world case study showcases the
capabilities of the proposed system. ",
month = nov,
pages = "112",
address = "Favoritenstrasse 9-11/E193-02, A-1040 Vienna, Austria",
school = "Research Unit of Computer Graphics, Institute of Visual
Computing and Human-Centered Technology, Faculty of
Informatics, TU Wien",
keywords = "pedestrian simulation, visualization",
URL = "https://www.cg.tuwien.ac.at/research/publications/2021/Zaufel_2021/",
}