

Markus Schütz , Lukas Herzberger, Michael Wimmer
, Lukas Herzberger, Michael Wimmer
SimLOD: Simultaneous LOD Generation and Rendering for Point Clouds
Proceedings of the ACM on Computer Graphics and Interactive Techniques, 7(1):17, May 2024. [ paper]
paper]
Information
- Publication Type: Journal Paper with Conference Talk
- Workgroup(s)/Project(s):
- Date: May 2024
- Journal: Proceedings of the ACM on Computer Graphics and Interactive Techniques
- Volume: 7
- Open Access: yes
- Number: 1
- Note: Source Code: https://github.com/m-schuetz/SimLOD
- Lecturer: Markus Schütz
- Article Number: 17
- ISSN: 2577-6193
- Event: ACM SIGGRAPH Symposium on Interactive 3D Graphics and Games 2024
- DOI: 10.1145/3651287
- Pages: 20
- Publisher: Association for Computing Machinery (ACM)
- Conference date: May 2023
- Keywords: LOD, real-time rendering, Point Cloud Rendering, rasterization, Octree
Abstract
LOD construction is typically implemented as a preprocessing step that requires users to wait before they are able to view the results in real time. We propose an incremental LOD generation approach for point clouds that allows us to simultaneously load points from disk, update an octree-based level-of-detail representation, and render the intermediate results in real time while additional points are still being loaded from disk. LOD construction and rendering are both implemented in CUDA and share the GPU’s processing power, but each incremental update is lightweight enough to leave enough time to maintain real-time frame rates. Our approach is able to stream points from an SSD and update the octree on the GPU at rates of up to 580 million points per second (~9.3GB/s) on an RTX 4090 and a PCIe 5.0 SSD. Depending on the data set, our approach spends an average of about 1 to 2 ms to incrementally insert 1 million points into the octree, allowing us to insert several million points per frame into the LOD structure and render the intermediate results within the same frame.Additional Files and Images
Additional images and videos
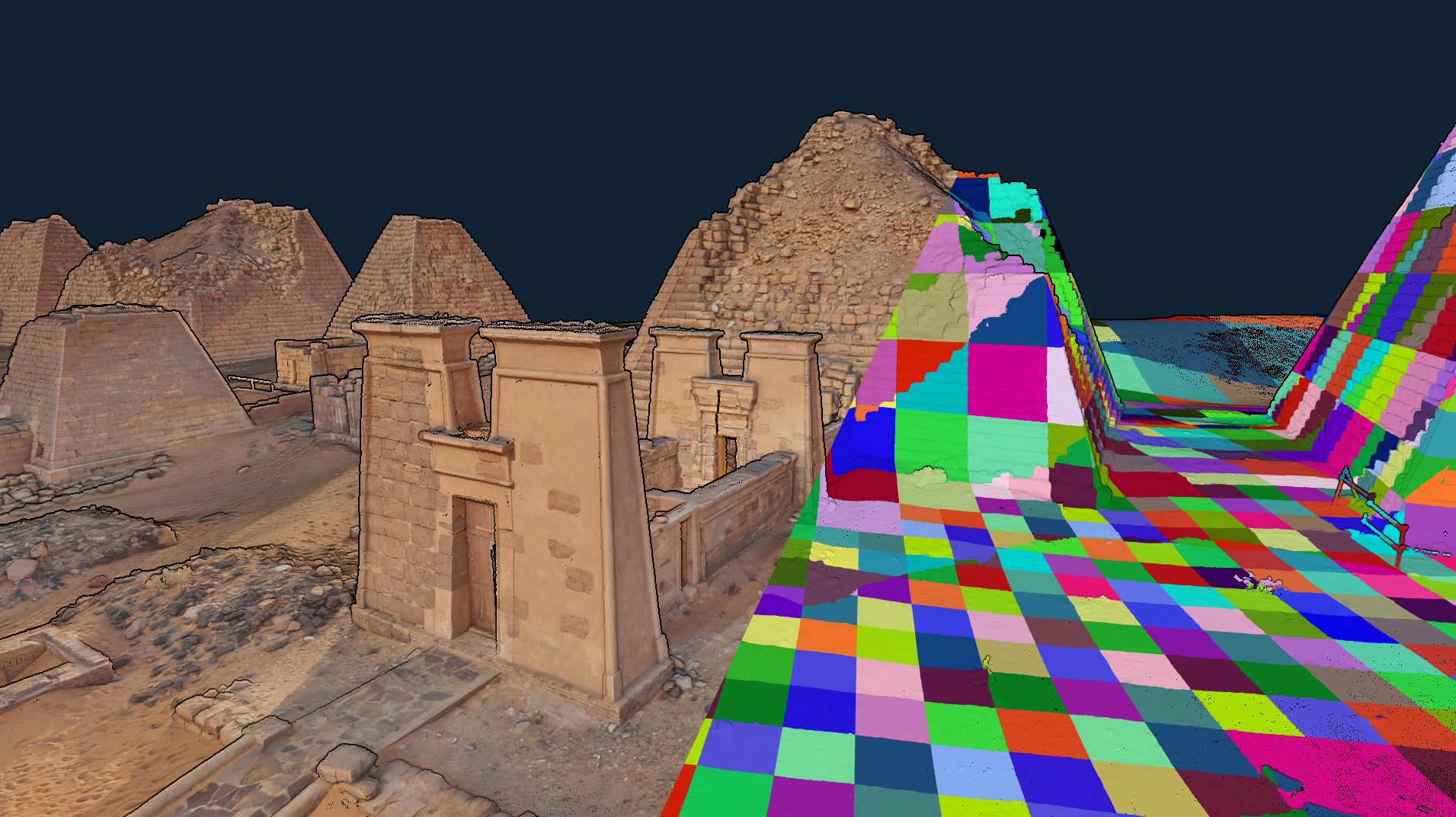
SimLOD:
Rendered Point Cloud to the left and points/voxels colored by the containing octree node to the right.
Additional files

Weblinks
BibTeX
@article{SCHUETZ-2024-SIMLOD,
title = "SimLOD: Simultaneous LOD Generation and Rendering for Point
Clouds",
author = "Markus Sch\"{u}tz and Lukas Herzberger and Michael Wimmer",
year = "2024",
abstract = "LOD construction is typically implemented as a preprocessing
step that requires users to wait before they are able to
view the results in real time. We propose an incremental LOD
generation approach for point clouds that allows us to
simultaneously load points from disk, update an octree-based
level-of-detail representation, and render the intermediate
results in real time while additional points are still being
loaded from disk. LOD construction and rendering are both
implemented in CUDA and share the GPU’s processing power,
but each incremental update is lightweight enough to leave
enough time to maintain real-time frame rates. Our approach
is able to stream points from an SSD and update the octree
on the GPU at rates of up to 580 million points per second
(~9.3GB/s) on an RTX 4090 and a PCIe 5.0 SSD. Depending on
the data set, our approach spends an average of about 1 to 2
ms to incrementally insert 1 million points into the octree,
allowing us to insert several million points per frame into
the LOD structure and render the intermediate results within
the same frame.",
month = may,
journal = "Proceedings of the ACM on Computer Graphics and Interactive
Techniques",
volume = "7",
number = "1",
note = "Source Code: https://github.com/m-schuetz/SimLOD",
articleno = "17",
issn = "2577-6193",
doi = "10.1145/3651287",
pages = "20",
publisher = "Association for Computing Machinery (ACM)",
keywords = "LOD, real-time rendering, Point Cloud Rendering,
rasterization, Octree",
URL = "https://www.cg.tuwien.ac.at/research/publications/2024/SCHUETZ-2024-SIMLOD/",
}