

Rahul Goel , Markus Schütz, P. J. Narayanan, Bernhard Kerbl
, Markus Schütz, P. J. Narayanan, Bernhard Kerbl
Real-Time Decompression and Rasterization of Massive Point Clouds
Proceedings of the ACM on Computer Graphics and Interactive Techniques, 7(3):1-15, August 2024.
Information
- Publication Type: Journal Paper (without talk)
- Workgroup(s)/Project(s): not specified
- Date: August 2024
- Article Number: 48
- DOI: 10.1145/3675373
- ISSN: 2577-6193
- Journal: Proceedings of the ACM on Computer Graphics and Interactive Techniques
- Number: 3
- Pages: 15
- Volume: 7
- Publisher: Association for Computing Machinery (ACM)
- Pages: 1 – 15
- Keywords: compression, point cloud, rasterization, real-time rendering
Abstract
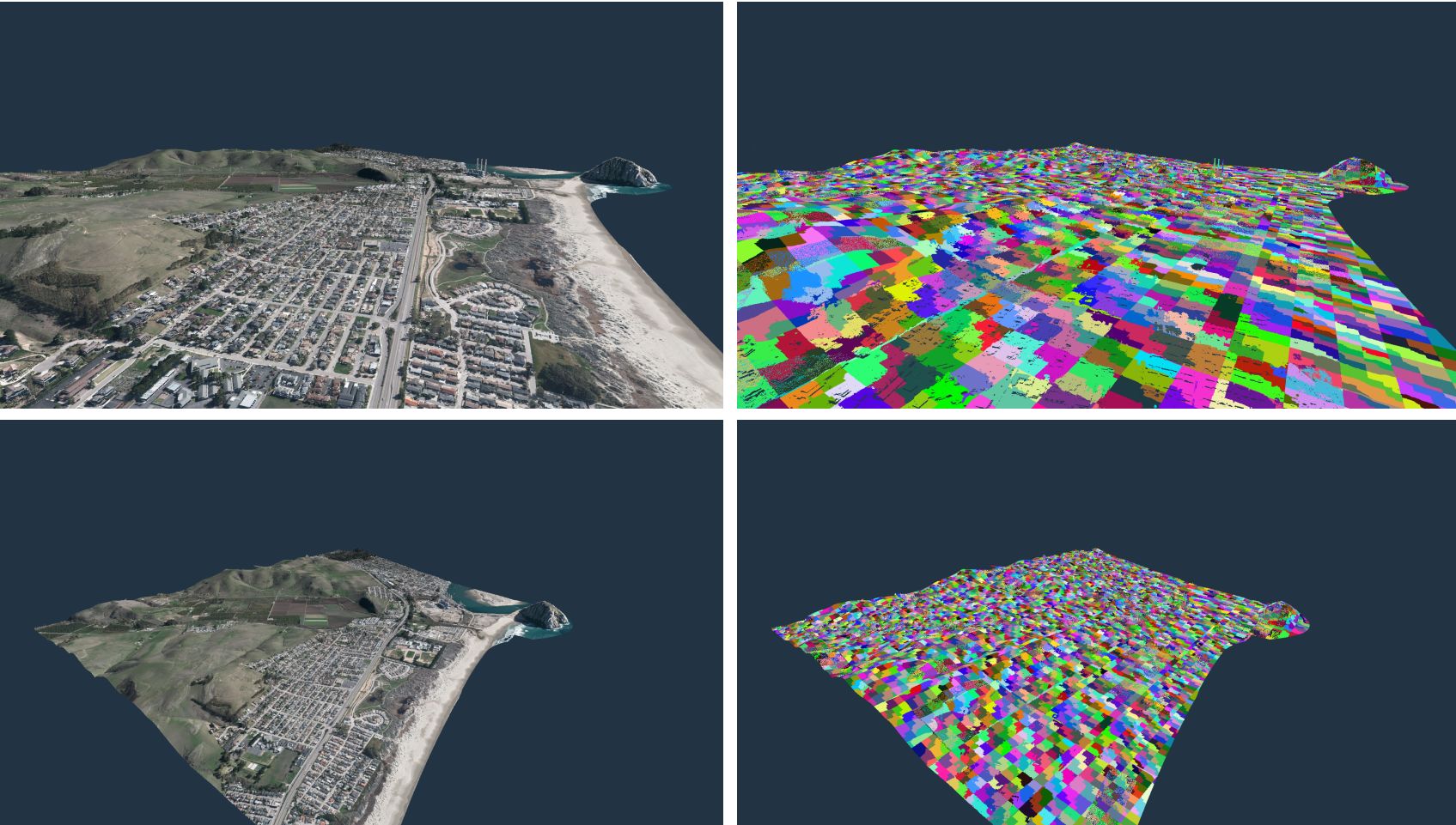
Large-scale capturing of real-world scenes as 3D point clouds (e.g., using LIDAR scanning) generates billions of points that are challenging to visualize. High storage requirements prevent the quick and easy inspection of captured datasets on user-grade hardware. The fastest real-time rendering methods are limited by the available GPU memory and render only around 1 billion points interactively. We show that we can achieve state-of-the-art in both while simultaneously supporting datasets that surpass the capabilities of other methods. We present an on-the-fly point cloud decompression scheme that tightly integrates with software rasterization to reduce on-chip memory requirements by more than 4×. Our method compresses geometry losslessly and provides high visual quality at real-time framerates. We use a GPU-friendly, clipped Huffman encoding for compression. Point clouds are divided into equal-sized batches, which are Huffman-encoded independently. Batches are further subdivided to form easy-to-consume streams of data for massively parallel execution. The compressed point clouds are stored in an access-aware manner to achieve coherent GPU memory access and a high L1 cache hit rate at render time. Our approach can decompress and rasterize up to 120 million Huffman-encoded points per millisecond on-the-fly. We evaluate the quality and performance of our approach on various large datasets against the fastest competing methods. Our approach renders massive 3D point clouds at competitive frame rates and visual quality while consuming significantly less memory, thus unlocking unprecedented performance for the visualization of challenging datasets on commodity GPUs.Additional Files and Images
Weblinks
BibTeX
@article{goel-2024-rdr,
title = "Real-Time Decompression and Rasterization of Massive Point
Clouds",
author = "Rahul Goel and Markus Sch\"{u}tz and P. J. Narayanan and
Bernhard Kerbl",
year = "2024",
abstract = "Large-scale capturing of real-world scenes as 3D point
clouds (e.g., using LIDAR scanning) generates billions of
points that are challenging to visualize. High storage
requirements prevent the quick and easy inspection of
captured datasets on user-grade hardware. The fastest
real-time rendering methods are limited by the available GPU
memory and render only around 1 billion points
interactively. We show that we can achieve state-of-the-art
in both while simultaneously supporting datasets that
surpass the capabilities of other methods. We present an
on-the-fly point cloud decompression scheme that tightly
integrates with software rasterization to reduce on-chip
memory requirements by more than 4×. Our method compresses
geometry losslessly and provides high visual quality at
real-time framerates. We use a GPU-friendly, clipped Huffman
encoding for compression. Point clouds are divided into
equal-sized batches, which are Huffman-encoded
independently. Batches are further subdivided to form
easy-to-consume streams of data for massively parallel
execution. The compressed point clouds are stored in an
access-aware manner to achieve coherent GPU memory access
and a high L1 cache hit rate at render time. Our approach
can decompress and rasterize up to 120 million
Huffman-encoded points per millisecond on-the-fly. We
evaluate the quality and performance of our approach on
various large datasets against the fastest competing
methods. Our approach renders massive 3D point clouds at
competitive frame rates and visual quality while consuming
significantly less memory, thus unlocking unprecedented
performance for the visualization of challenging datasets on
commodity GPUs.",
month = aug,
articleno = "48",
doi = "10.1145/3675373",
issn = "2577-6193",
journal = "Proceedings of the ACM on Computer Graphics and Interactive
Techniques",
number = "3",
pages = "15",
volume = "7",
publisher = "Association for Computing Machinery (ACM)",
pages = "1--15",
keywords = "compression, point cloud, rasterization, real-time rendering",
URL = "https://www.cg.tuwien.ac.at/research/publications/2024/goel-2024-rdr/",
}